
せっかく家事を自動化したくてロボット掃除機を導入したのに、帰宅するとコードに絡まって力尽きていたり、同じ場所で立ち往生していたりすると、がっかりしますよね。実は掃除機が迷子になる原因の多くは本体の性能不足ではなく、家具の高さや配線の出し方といった住環境側に潜んでいます。これまで数多くの家づくりをサポートしてきた経験から言えるのは、物理的な障害を論理的に取り除くことこそが全自動清掃への最短ルートだということです。本記事では、出しっぱなしの配線をゼロにする工夫や、基地への帰還エラーを防ぐコンセント位置の最適解、家具選びの基準を詳しく紹介します。この記事を読めば、掃除前の片付けという矛盾した家事から解放されるはずです。ロボット目線の間取り術を味方につけて、本当のゆとりを手に入れましょう。
ロボット掃除機が迷子になるとは何か 住環境との関係で理解する基本定義

光を透過または吸収する素材がセンサーの検知ミスを誘発する技術的根拠
ロボット掃除機の目は光の反射を頼りにしているため、物理的にそこに「ある」はずの家具を「ない」と判定したり、逆に何もない場所に「壁がある」と誤認したりすることがあります。これはセンサーが放つ赤外線やレーザー光が、特定の素材によって吸収、あるいは透過してしまうという物理現象が原因です。この特性を理解することが、迷子にならない家づくりの第一歩となります。
漆黒の家具や絨毯による「光の吸収」現象
光を反射せず吸収してしまう「漆黒」に近い色は、ロボットにとって非常に厄介な存在です。センサーが放った光が戻ってこないため、ロボットは目の前に障害物がないと判断し、勢いよく衝突してしまうことがあります。
- ピアノブラック塗装のテレビボード
- 光を吸い込む深い色のラグや絨毯
- 濃い茶色のアンティーク調家具
鏡やガラスによる「光の透過と反射」の迷宮
鏡や透明なガラスは、センサーの論理を根本から狂わせます。レーザーが鏡で反射すると、ロボットは鏡の奥に「実在しない別の空間」があるかのように認識することがあり、自分の現在地を見失う原因になります。
| 素材の特性 | センサーへの影響 |
|---|---|
| 透明度が高いガラス | 光が通り抜けるため、壁として認識できず衝突することがある |
| 高反射な鏡面 | 虚像の空間を認識し、地図データが乱れる要因になる |
これらの素材を多用した空間では、ロボットは常に「霧の中」を歩いているような状態に陥ることがあります。設計段階でこうした素材の配置を工夫するか、ロボットが認識できる高さまで目印を付けるなどの対策が必要です。
センサーが空間を正しく認識できずマッピングに失敗する論理的根拠
ロボット掃除機はLiDARやSLAMといった技術を用いて地図を作りますが、その処理には一定の論理があります。センサーから得た距離や画像特徴のデータをもとに座標を決めるため、データの質が低下すると情報の整合性が保てません。現実の部屋とシステム上の地図に乖離が生じ、迷走が始まることがあります。
LiDARによる距離測定と反射のジレンマ
レーザーを放ち、反射光が戻るまでの時間で距離を算出する仕組みは、素材の物理特性によって影響を受ける場合があります。
- 黒い壁や吸音材:光を吸収し、壁がないと誤判定することがある
- 鏡や金属面:光が乱反射し、実際とは異なる奥行きを認識することがある
- 透明な仕切り:光が透過し、物理的な壁を認識できない場合がある
特徴の欠如が招く現在地の見失い
カメラによる視覚認識は、目印のない均一な空間では十分に機能しないことがあります。
| センサーの種類 | 認識失敗の論理的要因 |
|---|---|
| レーザー方式 | 光の反射率が極端に低い、または異常反射する素材 |
| カメラ方式 | ランドマークとなる特徴点が不足している均質な壁面 |
目印のない長い廊下や、左右対称な家具配置はロボットを混乱させる要因になります。自分の座標を特定する視覚的特徴が見つからなければ、小さな移動誤差が積み重なり、最終的に帰還不能に陥る可能性があります。
鏡面反射や複雑な家具配置により現在地を喪失する具体的な現場事例
最新の機種でも、ある日突然、部屋の真ん中で力尽きている姿を見かけることはありませんか。それは環境の影響で起きている可能性があります。特に「鏡」や「黒く光る家具」は、ロボット掃除機が自身の現在地を把握するために不可欠なマッピング情報を狂わせ、迷子を引き起こす要因になることがあります。実務経験の中で実際に見てきた、現場の失敗事例をもとに紐解きます。
鏡やガラスが引き起こす空間認識のバグ
全身鏡や黒いテレビボードは、レーザーを反射させてしまうことがあります。ロボットは「鏡の奥に広い部屋がある」と誤認する場合があり、存在しない方向へ進もうとして衝突を繰り返し、地図データの乱れにつながることがあります。
- 床から15cm以内の低い鏡
- 透明なガラス天板のテーブル
- 光沢の強いピアノブラックの家電
密集した家具の脚が招く脱出不能事態
脚の多い椅子などは、迷路のような環境になります。一度入り込むと周囲の脚をすべて回避すべき障害物だと判定してしまい、センサー情報が過剰になることで、元のルートへ戻る脱出経路を見失うケースが発生することがあります。
| 環境要因 | ロボットへの影響 |
|---|---|
| 床まで届く姿見 | 虚像を実在の空間と誤認し、地図情報が乱れる |
| 4脚椅子の密集 | 回避動作が増え、脱出経路を見失う可能性がある |
ロボット掃除機のセンサー仕組みと家具の形状で検知エラーが起きる理由

レーザーや赤外線センサーが家具を検知して障害物を避ける基本的な仕組み
ロボット掃除機が暗闇でも壁にぶつからず、効率的なルートで走り回れるのは、目に見えない光を「目」として活用しているからです。主にレーザー光による距離測定と赤外線による近接感知を組み合わせ、部屋全体のデジタルマップを瞬時に構築しています。この論理的な空間把握こそが、迷子を防ぐための根幹技術といえるでしょう。
レーザー誘導(LiDAR)による高精度なマッピング
本体上部から放たれるレーザーは、数メートル先の障害物までの距離をミリ単位で計測します。反射して戻るまでの時間をもとに、部屋の形状を点群データとして処理する仕組みです。
- 部屋全体の壁際や大きな家具の配置を把握
- 自身の現在地を地図上の座標として特定
- 掃除済みのエリアと未清掃エリアを瞬時に判別
赤外線センサーによる近接回避と衝突防止
レーザーでは捉えきれない足元の細かな変化は、フロント部分の赤外線センサーがカバーします。見えない光の反射を利用して「目の前にある何か」を察知し、衝突前に速度を落とす役割を担います。
| センサー名称 | 主な役割 |
|---|---|
| LiDAR(レーザー) | 間取り全体の把握と自己位置の推定 |
| 赤外線センサー | 近距離の障害物検知とソフト衝突 |
最後は物理的なバンパーが反応することで、センサーの死角も確実にフォローします。こうした多層的な情報の裏付けがあるからこそ、ロボットは自信を持って部屋を動き回れるわけです。
光を透過または吸収する素材がセンサーの検知ミスを誘発する技術的根拠
ロボット掃除機は目に見えない光を放ち、その反射を捉えることで物体との距離を測っています。しかし、素材によってはこの光をすべて吸い込んでしまったり、逆に素通りさせてしまったりするため、論理的な計算が成り立ちません。物理的にそこにあるはずの壁や家具を認識できなくなるのは、最新機種でも避けられない科学的な特性なのです。
黒色素材による光の吸収と衝突リスク
ピアノブラックのテレビ台や濃い色のラグは、センサー光を吸収する性質が極めて強いといえます。光が戻ってこないため、ロボットは「何もない空間」だと判断し、減速せずに衝突してしまうわけです。
- 光沢のある黒い家具の脚
- センサー光を遮る厚手の暗色カーテン
- 階段の縁にある黒い見切り材
鏡やガラスによる透過と反射の混乱
ガラスや鏡は光を透過または不規則に反射させ、マッピングデータを乱す原因になります。鏡の中に「実在しない部屋」を作り出してしまうのは、典型的な迷子のパターンといえるでしょう。
| 対象素材 | ロボットの誤認内容 | 発生する問題 |
|---|---|---|
| 透明ガラス | 壁が存在しないと判断 | 衝突や進入禁止エリアの突破 |
| 大型の鏡 | 鏡の奥に広大な部屋があると認識 | マッピングの重複と帰還不能 |
光の跳ね返りを前提とする以上、こうした特殊な素材配置には物理的な工夫が欠かせません。
極細のアイアン脚やワイヤーフレーム家具を障害物と認識できない物理的限界
最新のロボット掃除機は高度なセンサーを搭載していますが、実は「分解能」という物理的な壁が存在します。特にデザイン性の高いアイアン製の細い脚やワイヤーフレーム家具は、放たれるレーザー光を十分に反射させることができません。その結果、ロボットは目の前に障害物があることに気づかず全速力で衝突を繰り返したり、隙間へ入り込んで立ち往生したりするのです。
センサーが捉えられない「細さ」の基準
一般的に直径が15mmから20mmを下回る細い脚は、多くの機種で検知が困難になります。反射光が微弱すぎてノイズとして処理されてしまうため、ロボットには「何もない空間」として映ってしまうわけです。これはセンサー方式の限界であり、決して故障ではありません。
- アイアン素材のサイドテーブル脚
- デザイナーズチェアの極細スチール脚
- 網目状のワイヤーメッシュ構造
回避不能な衝突が招くトラブルの論理
物理的なバンパーが反応する前に隙間を通り抜けようとするため、家具を傷つけるだけでなく本体が絡まって脱出不能になるリスクが高まります。こうした物理的な限界を理解した上で、脚にクッション材を巻いて太さを出すか、アプリ上で進入禁止エリアを正確に設定するなどの対策が必要不可欠です。
| 家具の形状 | 検知の難易度 | 発生しやすいトラブル |
|---|---|---|
| 一般的な木製脚 | 容易(低) | 手前で減速して優しく回避 |
| アイアン製細脚 | 困難(高) | 全速力での衝突、マッピングのズレ |
| ワイヤーフレーム | 極めて困難 | 隙間に噛み込み、完全停止 |
ロボット掃除機が止まりやすい家の共通点 走行を妨げる住環境の前提条件

ロボット掃除機が頻繁に停止する住宅に共通する物理的障害の定義
「ルンバがまた止まってる……」そんな悩みを抱える家には、ロボットの論理的な走行を阻害する共通の物理的ノイズが潜んでいます。デバイスは高度なプログラムに従って最短ルートを計算しますが、現実に存在する障害物がその計算結果を上回ったとき、エラーが頻発するわけです。ロボット掃除機にとっての障害物とは単なる壁ではなく、センサーの死角や駆動部の限界点に直結する物理的条件の総称といえるでしょう。
マッピングを狂わせる動的なノイズと静的な障壁
停止トラブルの多くは、設計段階で想定されていない微細な形状の不一致から生じます。
- 駆動輪が空転するわずかな床面の滑り
- センサーが検知できない高さ10cm未満の家具下隙間
- ロボットの旋回半径を無視した入り組んだ脚の配置
センサーが捉えきれない物理的な境界線の曖昧さ
ロボットは光や音の反射で世界を見ていますが、その精度を著しく下げる環境こそが真の障害物です。
| 障害の分類 | 具体的な住環境の例 |
|---|---|
| 幾何学的障害 | 本体直径+数センチしかない狭い通路や袋小路 |
| 光学的障害 | レーザーを吸収する黒い壁紙や、透過するガラス戸 |
これらの要素が複雑に絡み合うことで、デバイスは論理的な迷子状態に陥ります。住宅のバリアフリー化が進んでも、ロボット目線のバリアが残っていれば、自動化の恩恵を十分に享受することは難しいのです。
通路幅の不足や微細な段差がロボットの移動判断を混乱させる根拠
ロボット掃除機は論理的なプログラムによって経路を決定しますが、物理的な限界があるのも事実です。特に住宅設計において見落とされがちなのが、通路の幅とわずかな段差の処理といえるでしょう。本体サイズぎりぎりの隙間や、センサーが「越えられる」と判断しにくい微細な段差は、ロボットの移動判断を迷わせ、結果として清掃漏れや立ち往生を招く物理的な障壁となります。
通路幅が本体サイズプラス10cm必要な理由
ロボット掃除機は直進するだけでなく、障害物を避けるために旋回やバックという複雑な挙動を繰り返します。通路の幅が本体の直径と同じ程度しかない場合、センサーはそこを「行き止まり」と誤認して進入を諦めてしまうことが少なくありません。
- 掃除機の直径は機種により異なるが、約30cmから35cm程度が多い
- スムーズな旋回には左右各5cmずつの余裕が目安となる
- 狭い場所では何度も壁に衝突し、マッピング精度が低下する
センサーを惑わせる「2cmの壁」とスロープの死角
多くのロボット掃除機は2cm程度の段差を乗り越える性能を持っていますが、これには条件があります。段差の色が黒かったり、進入角度が斜めだったりすると、落下防止センサーが過剰に反応して「崖」だと誤解し、後退してしまうのです。
| 項目 | ロボットが混乱する原因 | 推奨される対策 |
|---|---|---|
| 通路幅 | 旋回スペース不足による経路放棄 | 本体直径プラス10cm以上の確保 |
| 段差 | 落下防止センサーの誤作動 | 1.5cm以下への抑制、またはスロープ設置 |
こうした物理的な制約を事前に解消しておかなければ、最新のナビゲーションシステムも宝の持ち腐れとなってしまうため、設計段階での配慮が求められます。
玄関マットの巻き込みや床置き小物により清掃が中断される典型的な事例
どんなに高性能なロボット掃除機でも、床に置かれた「小さな障害物」一つで簡単にその歩みを止めてしまいます。特に多くの家庭で見落とされがちなのが、玄関マットやキッチンマットといった薄手の敷物、そして何気なく床に置かれた日用品です。これらはセンサーで検知できても物理的に走行を阻害するため、清掃中断の主要な原因となります。
軽すぎる敷物が招く「めくれ」と「乗り上げ」エラー
裏面に滑り止めがない軽量なマットは、サイドブラシの回転や本体の移動によって簡単にめくれ上がります。ロボットはその段差を「乗り越えられない壁」と判断するか、あるいはめくれた布を吸い込み口に巻き込んで異常停止してしまいます。
- 毛足が長く柔らかいラグ
- 滑り止め機能のない玄関マット
- フリンジ(飾り房)のついたキッチンマット
「床置き」というノイズが引き起こす移動経路の混乱
スリッパや子供のおもちゃ、スマートフォンの充電ケーブルなどが散乱していると、ロボットはそれらを避けるために複雑な挙動を強いられます。回避行動を繰り返すうちに、掃除機は現在地を見失い、結果として未清掃エリアを残したまま力尽きるケースが少なくありません。
| 床置きアイテム | 清掃への具体的な弊害 |
|---|---|
| スリッパ・靴下 | 本体が押し歩き、家具の隙間などに挟まる |
| 細い充電ケーブル | メインブラシに絡まり、モーターがロックされる |
快適な自動清掃を実現するには、まずは「床に物を置かない」という運用ルールを徹底することが、高性能な機種を選ぶこと以上に重要といえるでしょう。
ロボット掃除機が通れる家具の高さ 目安12cm以上の理由

本体の高さに対して適切な垂直余白(マージン)を確保すべき理由
ロボット掃除機のカタログスペックに記載された「本体の高さ」だけを基準に家具を選んでいませんか。実は、物理的な接触を避け、かつセンサーの機能を最大限引き出すためには、本体の厚みを超える「垂直余白(マージン)」の確保が不可欠です。わずかな数値の誤差がデバイスを立ち往生させ、最悪の場合は大切な家具や高価な本体を傷つける直接的な原因となります。
センサーの視界確保と物理側でのスタック回避
多くの高性能モデルは、本体天面に「LiDAR」と呼ばれるレーザーセンサー塔を備えています。このセンサーは周囲360度をスキャンして現在地を特定するため、家具の底面とセンサーの間には遮るものがない一定の距離が必要です。
- センサー塔への衝撃を防ぎ、精密機器の寿命を延ばす
- 家具の影による死角を最小限に抑え、マッピング精度を向上させる
- 家具下への進入可否を判断する際の「誤認」によるスタックを防ぐ
床面の状態に左右されない安定走行の論理
床面は完全な水平ではなく、ラグの毛足やフローリングのわずかな撓みによって、走行中のロボットは常に上下に変動しています。
| 環境要素 | マージンが必要な論理的根拠 |
|---|---|
| 段差乗り越え時 | 敷居やラグの境界を越える際、車体が一時的に数ミリ跳ね上がるため |
| 厚手の敷物 | ラグの厚みの分だけ、家具の底面と床との実効距離が狭まるため |
こうした日常的な「動的な変動」を吸収するためには、本体高に少なくとも2センチから3センチの余裕を持たせなければなりません。この余裕こそが、ロボットが迷わず、止まらずに掃除を完遂できる「自由」を保証するのです。
床面の撓みやラグの厚みがセンサーへの接触と家具の下での立ち往生を誘発する根拠
カタログスペックの高さだけで家具を選んでいませんか。実は、実際の住宅環境では数値に現れない「高さの減少」が頻繁に発生しています。掃除機が家具の下に潜り込んだ瞬間に、予期せぬ摩擦や接触が起きるのは、物理的なゆとりの欠如が原因です。
ラグの沈み込みと床面の撓みが奪う有効スペース
厚手のカーペットやラグを敷いている場合、掃除機の車輪が沈み込むことで、実質的な有効高は数ミリから1センチ程度減少します。また、下地の撓みによってわずかに傾斜が生じれば、本体上部のセンサー塔が家具の底面に接触するリスクが跳ね上がるのです。
天面センサーの視界遮断と立ち往生の論理
多くの最新機種は本体天面にレーザーセンサーを搭載しており、ここが家具の底面と接触すると、周囲の状況をスキャンできなくなります。視界を奪われたロボットは論理的な経路計算ができず、エラー停止してしまうのです。
| 阻害要因 | 減少する高さの目安 | ロボットへの影響 |
|---|---|---|
| 厚手のラグ | 10mmから20mm | 物理的な接触と摩擦抵抗の増大 |
| 床面の撓み | 2mmから5mm | 天面センサーの視界不良による迷走 |
- 走行中の本体の微細な跳ね上がりも考慮すべき
- 段差乗り越え時の車輪の浮き沈みがスタックを招く
- 12cmの確保は「物理的な安全マージン」の定義である
家具の下に「絶対的な安全圏」を作るためには、これらの環境要因を合算した12cm以上のクリアランスが必要だという明確な論理的根拠となります。掃除機の自由を奪わない設計こそが、自動化の恩恵を最大化する鍵ではないでしょうか。
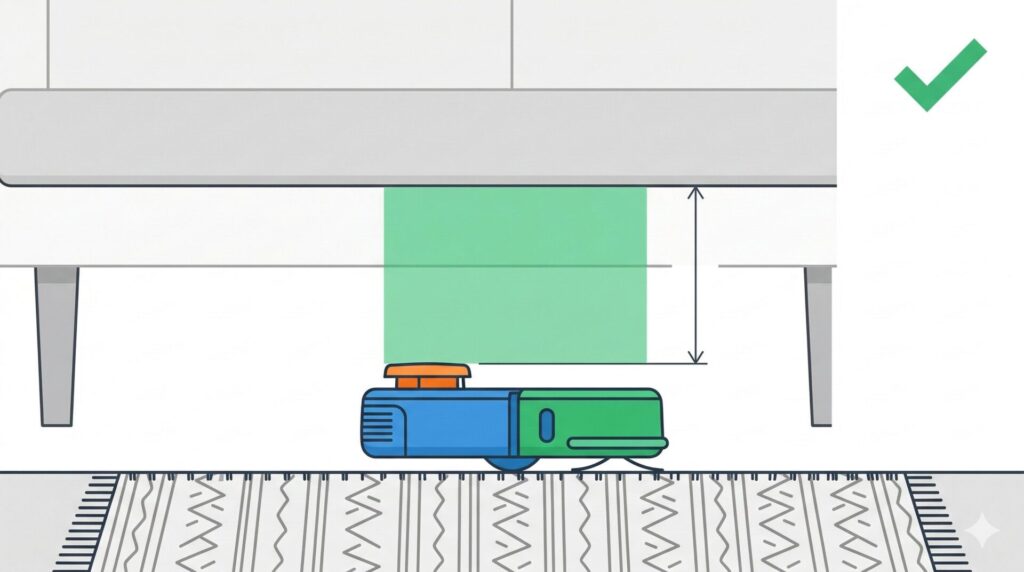
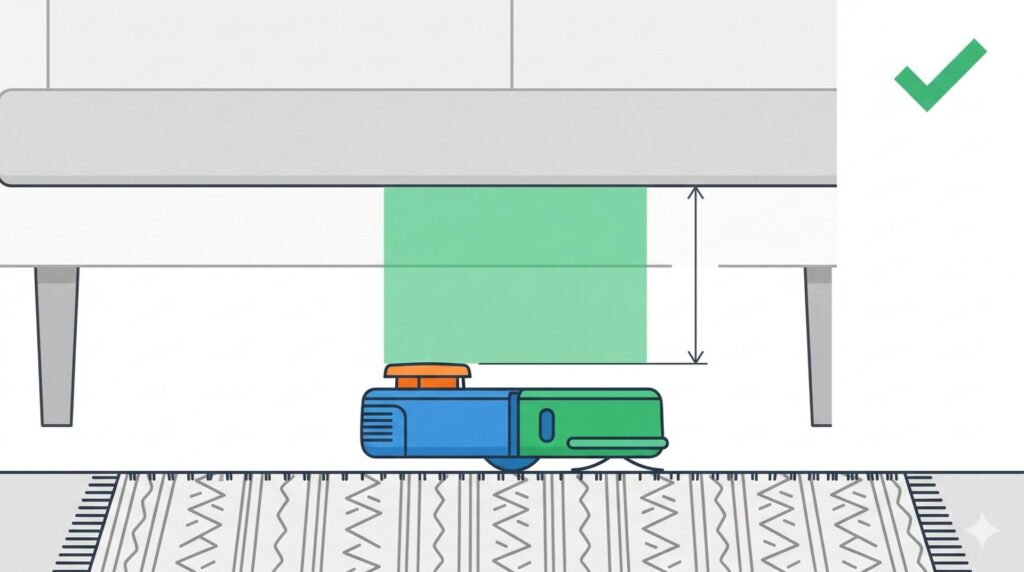
ソファやベッドの脚に余裕のある高さを確保した掃除効率化の具体例
ソファの下やベッドの奥は、ホコリの吹き溜まりになりやすい難所です。ロボット掃除機がスムーズに進入するためには、本体の厚みだけでなくセンサーが周囲を把握するためのゆとりが必要となります。脚の高さを12cm以上に設定すれば、物理的な衝突を防ぐだけでなく、マッピング精度の向上という大きな恩恵を受けられるのです。
ソファ下の死角をなくす脚の選択
多くの最新機種は高さ10cm前後ですが、ギリギリの設計では進入時に天面を擦るリスクが残ります。余裕を持った12cmの脚を採用することで、運用上のストレスを劇的に軽減できるでしょう。
- 本体天面の擦り傷やスタックを未然に防止
- レーザーセンサーの視界を遮らず家具奥まで認識
- 水拭き機能付き機種のモップが底面に触れるのを回避
寝室の空気環境を整える高さ設計
寝室は衣類や寝具から綿ボコリが発生しやすい場所といえます。ベッドフレームに十分な高さを確保すれば、重いマットレスを動かす手間なく毎日清潔な環境を維持することが可能です。
| 対象家具 | 推奨される脚の高さ | 掃除のメリット |
|---|---|---|
| ロータイプソファ | 12cmから15cm | 影になる部分のホコリ蓄積を抑えやすくする |
| 収納なしベッド | 12cm以上 | マットレスを動かさず毎日自動清掃が可能 |
わずか数センチの差が日常の家事負担を大きく左右します。これからの家具選びでは、デザインだけでなく掃除機の動線を優先するのが賢明な判断ではないでしょうか。
ロボット掃除機に向いている家具と向かない家具の特徴

走行ルートを確保しやすいソファやベッドの構造と選定基準
ソファやベッドは占有面積が広く、その下を清掃可能にすることが自動化の鍵です。ロボットがスタックせず帰還するには、高さだけでなく脚の形状や底面の構造が重要になります。デザインと機能性を両立させるための選定基準を論理的に整理しましょう。
センサー塔の干渉を防ぐ「高さ12cm」の重要性
本体厚みが10cm前後の機種でも、天面のセンサー塔を含めると垂直方向に厚みがあります。隙間がギリギリだと進入時に天面を擦り、精密機器を傷めるリスクを孕むのです。
- 本体高に2cm以上のマージンを加味して計測する
- ラグの沈み込みを考慮し12cmを最低線とする
- 補助脚の高さ不足に注意して製品を選定する
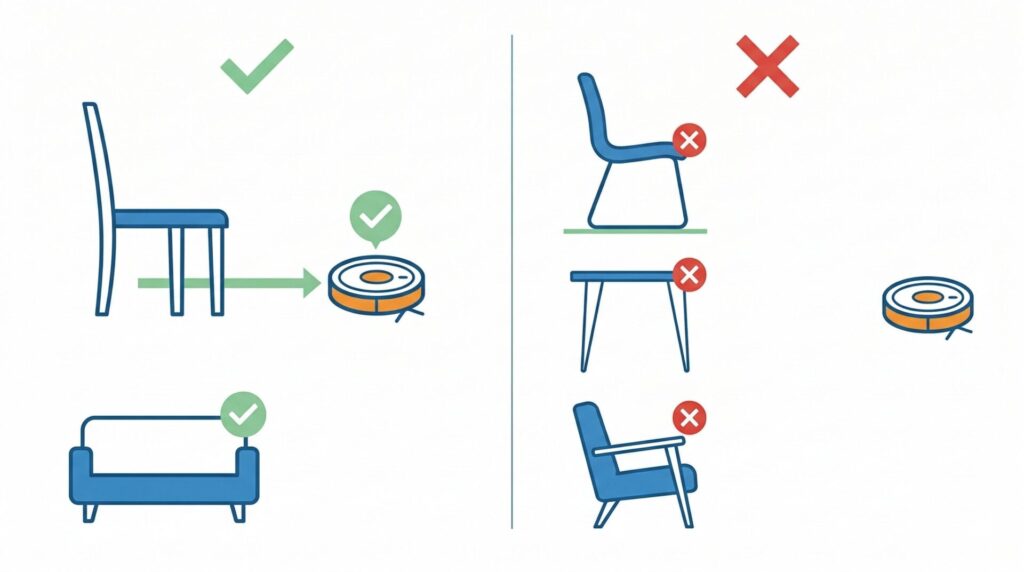
脚の形状と底板の強度が左右する走行安定性
床を這うようなソリ状のフレーム脚は、ロボットが乗り上げて停止する物理的な罠になります。
| チェック要素 | 推奨される仕様 | 非推奨の仕様 |
|---|---|---|
| 脚の形状 | 垂直な4本脚 | 横に渡されたバーフレーム |
| 底面の質感 | 硬質な仕上げ | 経年で垂れ下がる布張り |
垂直な脚なら、ロボットは最小限の回避行動で済みます。特にソファの底面が布張りの場合、重みで中央部が垂れ下がり、数年後に挟まってしまう事例が後を絶ちません。購入時には底面の剛性も重要な判断材料です。
素材や脚の形状により掃除効率を大幅に低下させる家具の特徴
見た目が優れたデザイナーズ家具でも、ロボット掃除機との相性が最悪なものは意外と多いものです。ロボットの「目」を惑わす光学的特性や、物理的に車輪を浮かせてしまう構造は、清掃の完遂を妨げる大きな要因となります。家全体をムラなく綺麗に保つためには、掃除機が「嫌がる」家具のサインを見極めなければなりません。
認識を妨げる鏡面・透過素材とスタックを誘発する傾斜
鏡面仕上げのステンレス脚や透明なアクリル素材は、センサー光を透過・乱反射させ、ロボットの混乱を招く原因です。また、裾が広がるような傾斜のある脚は、最も危険なスタックポイントといえるでしょう。
- 床との接地面が斜めになっているソファの脚
- センサーが検知しにくいほど細いワイヤー脚
- サイドブラシを絡め取る複雑な装飾パーツ
走行を遮断する「U字型パイプ脚」の論理的弊害
椅子によく見られるU字型のフレームは、厚みが絶妙に薄いため、ロボットが「段差」として乗り越えようと試みてしまいます。結果、フレームの上で車輪が空転し、エラー音とともに停止するケースが後を絶ちません。
| 家具の要素 | 効率低下の要因 | 具体的なエラー内容 |
|---|---|---|
| 素材感 | 鏡面や漆黒の塗装 | 衝突防止機能が働かず激突する |
| 底面の構造 | ソリ状の金属パイプ | 車体が浮き上がり走行不能になる |
効率を重視するなら、床との接地面は「4本の垂直な脚」で構成されたシンプルなものを選ぶのが、論理的な最適解ではないでしょうか。
掃除中だけ椅子を上げられるダイニングテーブルなどの実務的な導入事例
ダイニングルームの掃除において最大の障壁となるのが、密集した椅子の脚です。ロボット掃除機は脚の間を通り抜けようと奮闘しますが、脱出に時間がかかったり、脚周りの食べこぼしを吸い残したりすることが多々あります。この問題を物理的に解消する手法として、最近注目されているのが「掃除中だけ床から椅子を浮かせる」工夫です。実務的な視点で、どのように環境を整えるべきか具体例を見ていきましょう。
天板に引っ掛けられるハンギングチェアの活用
肘掛け部分をテーブルの天板に引っ掛けることで、脚を床面から完全に浮かせられるチェアが選ばれることがあります。これによりロボットは脚を一切気にせず、テーブル下を一直線に走行できるようになります。
- ルンバなどの旋回スペースを確実に確保
- 脚周りのホコリ溜まりを根本的に解消
- 重い椅子を別室に移動させる手間を軽減
運用で解決する椅子上げのルーティン化
家具の買い替えが難しい場合でも、出勤前や就寝前に椅子を天板へ逆さに置く、あるいは少し引いて隙間を作るだけで効率は劇的に変わります。こうした日々の小さな積み重ねが、ロボット掃除機が真価を発揮する「整った家」を作ります。
| 導入手法 | 具体的なメリット | 注意点 |
|---|---|---|
| ハンギングチェア | 床がフラットになり、最短時間で掃除が完了する | 天板の耐荷重や肘掛けの形状に相性がある |
| 手動での椅子上げ | 追加の購入なしで始められ、清掃漏れを確実に防げる | 毎日の動作として定着させる習慣化が必要 |
ロボット掃除機が引っかかる家具配置とは 掃除動線を妨げるレイアウトの特徴

ロボット掃除機の迷子を防ぐシンプルな掃除動線と家具レイアウトの重要性
ロボット掃除機を効率よく走らせるためには、家具の配置を「点」ではなく「線」で捉える意識が大切です。迷子問題の多くは、デバイスの演算能力を超える複雑な迷路を人間が作ってしまうことに起因します。掃除のたびにエラーで止まるストレスを解消するには、センサーが自己位置を見失わないための「論理的な一本道」を間取りの中に組み込む視点が必要不可欠ではないでしょうか。
回遊性と直進性を優先した家具配置のコツ
マッピング精度の向上には、行き止まりを減らし部屋全体を円滑に移動できる回遊動線の構築が効果的です。特に基地から各部屋へのメイン通路に障害物を置かないことで、最短距離での帰還がしやすくなります。
- 廊下やリビングの動線上に置く観葉植物やゴミ箱の排除
- 家具を壁際に寄せて床の露出面積を最大化する配置
- 掃除機がUターンせずに済むスムーズなコーナー設計
論理的なレイアウト設計によるエラー回避の基準
家具をアイランド状に点在させるのではなく、グループ化して壁面に集約させることで、ロボットの判断回数を大幅に減らせます。
| 項目 | 理想的なシンプルレイアウト | 迷子になりやすいレイアウト |
|---|---|---|
| 家具の配置 | 壁面に沿って一列に集約されている | 中央に小さな家具や小物が点在している |
| 動線の形状 | 直線と緩やかな曲線のみで構成 | 行き止まりや鋭角な曲がり角が連続する |
シンプルな環境こそが、センサーの誤認を防ぎ、バッテリーを無駄にしない最速の清掃を実現する有効な手段といえます。
複雑な家具の配置が走行を妨げ基地への帰還エラーを誘発する根拠
ロボット掃除機が掃除を終えて無事にドックへ戻るためには、移動中も自身の現在地を正確に把握し続ける必要があります。しかし、家具がパズルのように入り組んで配置されていると、移動中に得られるセンサー情報が不連続になり、地図データにズレが生じてしまうのです。特に基地(ホームベース)周辺に障害物が多い場合、最終的なドッキング軌道を描けず、目と鼻の先で力尽きてしまうケースが目立ちます。
「動線の袋小路」が引き起こすマッピングの破損
家具の隙間を縫うように走る複雑なルートは、ロボットの演算負荷を高めるだけでなく、物理的な迷走を誘発します。
- 壁から離して配置されたソファの背後空間
- 互い違いに置かれた収納棚が生むクランク状の通路
- 旋回半径を確保できない狭いコーナー
基地への帰還を阻む「最短ルートの論理的破綻」
基地へ戻る際、ロボットは直線的な経路を優先しようとしますが、家具がその直線を遮ると何度も迂回を繰り返すことになります。基地から半径1.5m程度の範囲に大きな家具がある環境では、誘導信号を正しく受信しにくくなり、帰還エラーの確率が高まりやすいのは避けられません。
| 配置条件 | 帰還への影響 | 成功率の傾向 |
|---|---|---|
| 基地周辺が開放的 | 誘導信号を早期にキャッチし、スムーズに直進可能 | 高い |
| 複雑な家具配置 | 信号の遮断と経路の誤認による無駄な旋回 | バッテリー切れによる失敗増 |
こうしたエラーを防ぐには、家具単体のサイズだけでなく、家全体の「回遊性」を意識したレイアウト設計こそが不可欠といえます。
入り組んだ椅子脚の密集地帯や行き止まりが立ち往生を招く具体的な現場事例
ダイニングルームや家具の隙間は、ロボット掃除機にとって最も過酷な迷宮になりがちです。特に家族が集まる食卓周辺は椅子の脚が密集し、ロボットが進入はできても脱出経路を見失うケースが後を絶ちません。こうした物理的な罠が間取りの中にどれだけ存在するかを把握することが、自動掃除の成功率を左右する重要なポイントとなります。
椅子の密集が生む「脚の迷路」
4人掛けのダイニングセットでは、テーブルの脚4本に加えて椅子の脚16本の合計20本もの脚が狭いエリアに集中します。椅子の間隔が本体の直径に余裕を持たせた45cm未満の場合、ロボットは隙間を縫って入るものの、旋回スペースが足りずに出口を塞がれた状態に陥るのです。
- 本体サイズ+10cm以上の間隔がない椅子の配置
- 複雑な形状をしたデザイナーズチェアの脚
- 椅子の脚同士を繋ぐ補強バーによる乗り上げ
家具の隙間が作る「袋小路」の罠
壁とソファ、あるいは棚とサイドテーブルの間にわずかな隙間があると、ロボットは掃除のためにそこへ入り込みます。しかし、奥で行き止まりになっている場合、旋回ができずバックと前進を繰り返してバッテリーを浪費した挙句、力尽きてしまう事例が目立ちます。
| 現場事例 | 発生するトラブル |
|---|---|
| 壁と家具の35cm程度の隙間 | 旋回不能による立ち往生とエラー停止 |
| 家具の背面とカーテンの重なり | センサーの誤認による現在地の消失 |
こうした現場では、あえて家具を壁に密着させるか、ロボットが物理的に入れない幅まで狭める工夫が求められます。
ロボット掃除機が引っかからない配線整理 コンセント位置と配線計画の重要性

ロボット掃除機の巻き込みを根本から防ぐ床置き配線ゼロの重要性と隔離の考え方
ロボット掃除機を導入しても、結局人間がコードを片付けていては本末転倒です。エラーによる停止を根本から断つには、床面に一本のケーブルも存在しない「床置き配線ゼロ」の状態を目指さなければなりません。これは単なる整理整頓ではなく、デバイスが迷わず走行するための「道路整備」といえるでしょう。
「床置き配線ゼロ」を実現するための物理的アプローチ
配線が床に垂れ下がっているだけで、最新の回避機能もその性能が著しく制限されます。まずは物理的に「浮かす」ことから始めましょう。
- 配線カバーを用いた壁面への完全固定
- マジックテープによる家具背面へのケーブル集約
- コンセント位置を床から離して設置する建築的工夫
物理的隔離とバーチャル隔離の使い分け
どうしても配線を動かせない場所では、ロボットをそこへ近づけない「隔離」の考え方が重要となります。
| 隔離手法 | メリット | 適した場所 |
|---|---|---|
| 物理的隔離 | 確実に進入を防ぎ、通信エラーの影響を受けない | 複雑な配線が集中するデスク周り |
| バーチャル隔離 | 家具の配置を変えずアプリ上で柔軟に設定可能 | 季節家電のコードなど一時的な配線エリア |
配線を隔離して初めて、ロボットは迷いやスタックから解放されます。自動化の恩恵を最大化するには、デバイスに合わせるのではなく、住まい側を「ロボットフレンドリー」にアップデートする決断が不可欠なのです。
床面の露出ケーブルがサイドブラシのロックや火災リスクを誘発する技術的根拠
床を這う電源コードやスマートフォンの充電ケーブルは、ロボット掃除機にとって最も回避すべき「罠」といえます。障害物回避機能が向上した最新機種であっても、細いコードはセンサーの死角に入りやすく、一度巻き込むと強力なモーター回転によって瞬時に絡まり、清掃を強制終了させてしまいます。単なるエラー停止で済めば良いですが、物理的な負荷が加わり続けることで、最悪の場合は家電製品の故障や火災といった深刻な二次被害を招く論理的根拠があるのです。
サイドブラシとメインローラーへの巻き込みメカニズム
サイドブラシはゴミをかき集めるために高速回転しており、床にある細いコードを先端で掬い上げてしまいます。一度軸に巻き付くと、ロボットが脱出しようと逆回転や強引な走行を繰り返すことで、コードがより強固に食い込み、モーターに過大な電流負荷をかけてロック状態に陥るわけです。
- 摩擦熱によるブラシの変形や破損
- 過負荷保護機能による緊急停止
- 断線による接続機器の電源喪失
被覆の損傷とトラッキング現象による火災リスク
巻き込まれた状態でロボットが走行を続けると、コードの絶縁被覆が削られ、芯線が露出する「物理的損傷」が発生します。これがショートの原因になるだけでなく、損傷箇所に溜まったホコリが湿気を吸うことで、トラッキング火災を引き起こすリスクも無視できません。
| ケーブルの種類 | 巻き込み時の危険度 | 主な被害予測 |
|---|---|---|
| スマホ充電コード | 極めて高い | コネクタ端子の破損、ケーブルの断線 |
| 家電の電源コード | 高い | 絶縁被覆の摩耗、ショートによる発火 |
快適な自動清掃を実現するには、こうした物理的なリスクを設計段階で排除する「配線の空中化」が求められます。
有資格者による壁内配線や造作家具の活用で安全な住環境を作る設計事例
床を這う電気コードは、ロボット掃除機にとって最も危険な「蛇」のような存在です。一度絡まれば清掃は中断し、断線や火災のリスクすら孕みます。こうしたトラブルを未然に防ぐには、建築段階で電気工事士などの有資格者と連携し、物理的にコードを床から排除する設計が効果的です。プロの視点を取り入れた配線計画は、単なる片付けの手間を省くだけでなく、住まい全体の安全性と美観を劇的に向上させます。
壁内配線の工夫とコンセント高の最適化
壁の中に配線を通す「隠蔽配線」を採用すれば、床に露出するコードをゼロに近づけられます。特にテレビ周りなど電化製品が集中するエリアこそ、有資格者による緻密な設計が真価を発揮する現場といえるでしょう。
- 壁掛けテレビ裏への配線ポート集約
- 床面から25cm程度高い位置へのコンセント移設
- マルチメディアコンセントによる通信線の一括管理
造作家具と配線ピットによるコード隠しの論理
家具の内部に専用の配線路(ピット)を設けることで、掃除機が自由に走り回れるフラットな床面を死守できます。既製品の家具では難しい「コードの完全隠蔽」も、造作家具なら設計段階でスマートに解決可能です。
| 設計手法 | 具体的な特徴 | 清掃へのメリット |
|---|---|---|
| 壁内隠蔽配線 | 電気工事士が壁裏にコードを埋設 | 足元の物理的障害物を根本から排除 |
| 造作家具ピット | 家具の背板や底面に配線スペースを確保 | 充電ステーションを家具内に美しく格納 |
適切な配線計画は、ロボットが「迷子」になる物理的根拠を断つ手法です。リフォームや新築の際には、こうした「掃除動線の安全確保」を要件に加えることが、賢い家づくりの新常識ではないでしょうか。
ロボット掃除機基地の正しい設置場所 帰還エラーを防ぐ充電ステーション配置

ロボット掃除機が確実に帰還するための基地設置場所の重要性と選定基準
ロボット掃除機にとって、充電ステーション(基地)は単なる補給ポイントではなく、部屋の地図を描く際の「原点」となる重要な場所です。この場所選びを間違うと、掃除が終わったのに基地に戻れず力尽きたり、地図が歪んで同じ場所ばかり掃除したりするトラブルが発生します。家全体の「掃除の成功率」を左右するのは、本体の性能以上に基地の設置環境といっても過言ではないでしょう。
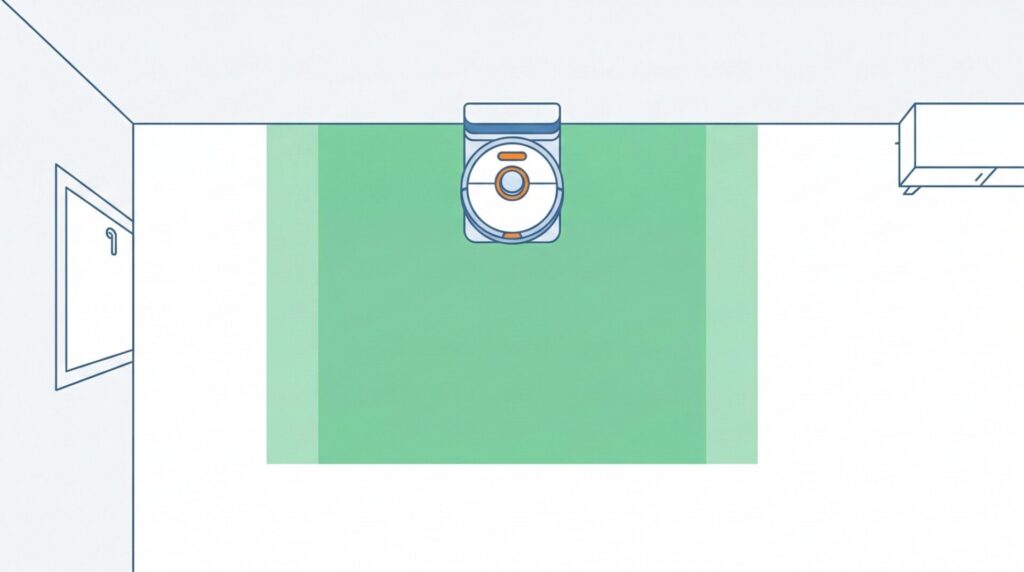
センサーが「原点」を捕捉できる開放的な空間の確保
ロボットは基地から放たれる誘導信号や、周囲の風景をスキャンして戻るべき場所を特定します。基地の周りに物が溢れていると信号が遮断されて現在地を見失うため、見えない光の道筋を確保することが迷走を防ぐ第一歩ではないでしょうか。
- 左右に各50cm、前方に1.5m程度の障害物がないフラットなスペースを死守する
- Wi-Fiの電波が安定して届く場所を優先的に選ぶ
- 直射日光が赤外線センサーを狂わせる窓際は回避する
物理的な「ドッキングの容易さ」を考慮した床面条件
基地付近の床面が不安定だと、最後のドッキング工程で接触不良が起きやすくなります。本体が基地に乗り上げる際、わずかな傾きがあるだけで端子が正しく合わず、いつまでも充電が始まらない事態に陥るわけです。
| 選定項目 | 設置基準の論理的根拠 |
|---|---|
| 床の硬度 | カーペットの上ではなく、沈み込みのないフローリングが最適 |
| 段差の有無 | 真正面に段差や傾斜があると、車輪がスリップして進入に失敗する |
理想的な場所を一度決めたら、みだりに動かさないことも運用上のコツといえます。原点が動くとロボット内部の論理空間が崩壊し、再び最初からマッピングをやり直す手間が生じてしまいます。
赤外線信号の反射干渉や周囲の障害物が帰還エラーを招く技術的根拠
ロボット掃除機が掃除を終えて確実に基地へ戻るためには、ホームベースから放たれる赤外線誘導信号を正確に受信しなければなりません。しかし、この見えない光の道筋は、周囲の素材や障害物によって容易に遮られたり、乱反射を起こしたりする性質があります。基地の目と鼻の先でロボットが右往左往し、結局力尽きてしまう帰還エラーの多くは、こうした光学的な干渉が論理的な原因となっているのです。
鏡面素材による赤外線の乱反射と信号の誤認
鏡面仕上げの家具やガラス戸が基地の近くにあると、赤外線が反射して「偽の誘導信号」を作り出します。ロボットはどの信号が本物か判断できず、迷走を繰り返した挙げ句にドッキングに失敗するわけです。
- 直射日光の入り込みによる赤外線ノイズの発生
- 黒色の床面による誘導信号の吸収現象
- ステンレスや鏡による光の乱反射
物理的スペースの不足が招く旋回不能と進入失敗
ドッキングの最終工程において、ロボットは極めて繊細な直進軌道を描いて進入します。基地の左右や前方に物理的なゆとりがないと、微調整のための旋回スペースが確保できず、接触を避けるために帰還を断念してしまうのです。
| 干渉要因 | ロボットへの影響と弊害 |
|---|---|
| 左右50cm以内の障害物 | 旋回スペース不足による軌道逸脱 |
| 正面1.5m以内の家具 | 誘導信号の捕捉遅延と接近速度の誤認 |
光学的な特性を無視した配置は、どれほど高性能な機種であっても「迷子」を生む直接的な引き金になり得ます。
階段下や造作家具内への基地設置とプロによる専用配線の成功事例
ロボット掃除機の充電ステーションは意外と存在感があり、インテリアを損ねる原因にもなりかねません。そこで注目されているのが、階段下などのデッドスペースを有効活用した「隠れ基地」の造作です。単に隠すだけでなく、デバイスがスムーズに帰還できるよう、赤外線信号の視覚的なゆとりを確保した設計こそが成功の鍵となるでしょう。
階段下や造作家具を専用基地へ変える設計術
クローゼットの下部に20センチ程度の開口部を設けることで、掃除機を使用しない時間は視界から完全に消し去ることが可能です。造作家具の一部として基地を組み込めば、リビングの美観を保ちつつ、自動化の恩恵を存分に享受できるわけですね。
- 階段下のスペースを利用した専用ピット
- 造作収納を床から浮かせるフロート施工
- 赤外線を通すルーバー扉の採用
プロによる専用配線とメンテナンス性の確保
専用基地を作る際は、コンセントを奥ではなく横や上の壁面に配置するのが実務上のコツです。これにより、コードが走行を妨げるのを防ぎつつ、不測の事態での操作も容易になります。
| 設置場所 | 設計上のポイント | 得られるメリット |
|---|---|---|
| 階段下 | 内部にコンセントを増設し、床をフラットにする | デッドスペースの解消と動線の確保 |
| 造作家具下 | 奥行き45cmを確保し、排気スペースを作る | 存在感を消し、ホコリの蓄積を防止 |
こうした定位置を建築時に確定させておけば、配線トラブルによる迷走リスクを論理的に排除できるはずです。
ロボット掃除機の導入でよくある質問とプロが教える解決策

ロボット掃除機の利用者が直面する典型的なトラブルとプロが推奨する根本解決策
ロボット掃除機を導入した多くの人が直面するのが、「仕事から帰ると玄関で力尽きている」といった予期せぬ停止トラブルです。最新のAIを搭載した機種であっても、物理的な環境が整っていなければその性能を100%引き出すことは困難といえるでしょう。プロが推奨するのは、ロボットの設定をいじることではなく、ロボットが迷わないように「家側」の環境をアップデートする根本的な解決策です。
走行中断を招く「物理的な罠」の排除
最も多いトラブルは、細い電源ケーブルや薄いマットの巻き込みによる強制停止です。これらはセンサーで検知しにくいため、人間側が事前に対策を講じる必要があります。
- 壁沿いのコンセント付近にあるコードの空中配線化
- 滑り止めマットの固定、または清掃時のみの撤去
- 床まで届くカーテン裾のクリップ留め
帰還エラーと未清掃エリアの解消
基地に戻れない、あるいは特定の部屋に入らない問題は、マッピング情報の不連続性が原因となるケースが目立ちます。反射物や不安定な扉がロボットの「目」を惑わせるからですね。
| トラブル内容 | プロの視点による根本解決策 |
|---|---|
| 基地の寸前で迷走する | 左右50cm程度の範囲に反射物(鏡・ステンレス)を置かない |
| 未掃除の部屋が残る | ドアストッパーで扉を半開きに固定し、常に同じ通路幅を保つ |
特定の床材や数センチの段差で発生する動作不良を論理的に解消すべき根拠
「ロボット掃除機が特定の場所で動かなくなる」現象には、センサーの光学特性や駆動輪の摩擦係数といった明確な物理的根拠が存在します。最新機種でも、光を吸収する漆黒の絨毯や、センサーが「崖」と誤認する数センチの段差には抗えません。こうした動作不良の要因を論理的に排除することは、製品の寿命を延ばし、清掃の完全自動化を達成するために不可欠なプロセスといえるでしょう。
漆黒の床材や光沢素材が招くセンサーエラー
ロボット底面の落下防止センサーは、赤外線の反射で床の有無を検知する仕組みです。しかし、光を吸収しやすい真っ黒なラグなどでは、センサーが「そこに床がない」と誤認して停止してしまいます。
- 濃い色調のタイルや絨毯での立ち往生
- 強い直射日光がセンサーを惑わして作る仮想の壁
限界点を超える段差による機械的負荷と走行不能
多くの機種が謳う「2cmの段差乗り越え」は、進入角度や床の滑りやすさ次第で車輪の空転を招きます。無理な乗り越えの試行は、駆動モーターへの過大な負荷や本体のスタックに直結するのです。
| 動作不良の要因 | 技術的な発生根拠 | 論理的な解決策 |
|---|---|---|
| 黒色の床材 | 赤外線信号の吸収による誤作動 | 明るい色の素材へ変更、または進入禁止設定 |
| 3cm以上の段差 | サスペンション可動域の物理的限界 | 専用スロープ設置によるバリアフリー化 |
椅子脚の素材変更や段差のスロープ化により清掃効率を改善した具体的な現場事例
ロボット掃除機の性能を嘆く前に、住環境側に「歩み寄る」工夫を施すことで、エラーは劇的に減少します。多くの現場で共通する課題は、物理的なセンサーの死角と走行限界への対応です。これらを解決した具体的な改善事例を紐解くと、最新デバイスの真価を引き出すためのヒントが見えてくるでしょう。
椅子脚の素材変更とマーキングによる検知率の向上
センサーが捉えにくい極細のアイアン脚に対し、脚の底部に木製のカバーを装着したり、認識しやすい色のフェルトを巻いたりする対策が効果的です。これにより、ロボットは物理的な衝突を回避し、減速して丁寧に清掃を完遂するようになります。
- 反射の強いクロームメッキ脚をマットな素材へ変更
- センサー高に合わせた脚元へのポイントマーキング
- U字型パイプ椅子を4本垂直脚の製品へリプレイス
段差のスロープ化によるエリア拡大と帰還の安定
2cmを超える段差は、ロボットにとって乗り越えが難しい「壁」そのもの。ここに市販のゴム製スロープや床材に合わせた造作部材を設置することで、掃除エリアを一気に拡大させた事例が数多くあります。
| 改善箇所 | 具体的な処置 | 改善後の効果 |
|---|---|---|
| 和室の敷居 | 勾配10度以下のスロープを設置 | 全室の一括清掃が可能に |
| 玄関の框 | 段差緩和用の造作部材を追加 | 落下防止センサーの誤作動を解消 |
こうした物理的なアップデートは、デバイスの買い替えよりも低コストで、確実な時短効果をもたらす賢い投資といえますね。
まとめ
ロボット掃除機を真の相棒にするためには、高性能な機種選び以上に、デバイスが迷わず走行できる環境づくりが不可欠です。家具の下には12cm以上の余裕を持たせ、床置きの配線をゼロに近づける設計こそが、自動清掃の成功率を飛躍的に高める最適解となります。また、基地周辺の信号干渉を避ける配置や、ロボットの目線に立った家具選びを意識することで、日々のメンテナンス負荷は劇的に軽減されるはずです。もし今、お使いの掃除機が頻繁に止まってしまうなら、まずは家具の隙間やコードの溜まり場を一度見直してみてください。わずか数センチの配置変更や一本のケーブル整理が、驚くほどスムーズな清掃体験へとつながります。理想の全自動ライフを目指して、まずは今夜、ご自宅の床をロボットの視点で点検することから始めてみませんか。

Follow me!
【ブログ運営・記事作成にお悩みの方へ】AIのスピードとプロの品質で、継続的な情報発信を実現しませんか?
私たちは、最新のAI技術と専門ライターの視点を掛け合わせ、効率的かつ高品質な記事作成をサポートいたします。
◎こんなお悩みはありませんか?
・日々の業務が忙しく、ブログ更新が数ヶ月止まっている
・SEO対策をしたいが、キーワード選定や構成案の作り方がわからない
・自社で書くと内容が偏ったり、文章の品質が安定しなかったりする
・外注したいが、コストを抑えつつ専門性の高い記事がほしい
AIを活用したライティングは、従来の執筆工程を大幅に短縮し、安定した頻度で質の高いコンテンツを世に出すことを可能にします。
◎AIブログ作成支援サービスが選ばれる理由
・AI活用による圧倒的なスピードと高いコストパフォーマンス
・プロの編集者が校閲し、AI特有の不自然さを排除した「読まれる」文章
・最新の検索アルゴリズムに基づいた、成果に繋がるSEO最適化
・企画、キーワード選定から執筆まで、運用を丸ごとお任せ可能
◎「まずは1記事から」の効果を実感してください
「AIでどこまで書けるのか試してみたい」「現在のブログの改善点を知りたい」という方へ、導入前のヒアリングを行っております。お客様の業界やターゲットに合わせた最適な運用プランをご提案します。
◎無料相談・お見積り受付中
現在の運用状況や達成したい目標について、まずはお聞かせください。効率的な情報発信のパートナーとして、貴社のビジネスに貢献するコンテンツ制作をサポートいたします。

コメント